learning model team
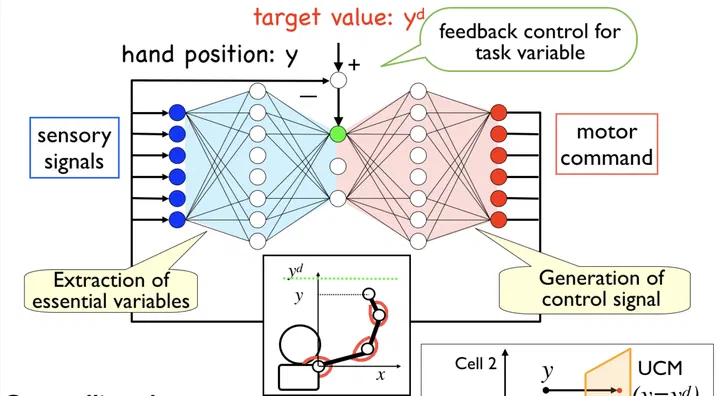
Extraction of essential information and exploitation of redundancy
The brain extracts the essential information from the information from the huge number of sensors in the whole body every moment, and sends the appropriate motor command to the huge number of our muscles. In our laboratory, the learning mechanism how brain discovers essential information and acquire motor commands to control our highly redundant body.
Learning models for coupled neural oscillators
Basic locomotor patterns are generated by the mutual entrainment between the physical system, i.e., the body, and the CPG (central pattern generator) which is composed of neural oscillators. We have proposed simple associative learning models for coupled neural oscillators which enable the learning of instructed phase pattern and the adaptive control of periodic locomotor pattern.
Hierarchical control model of locomotion
In the production of basic locomotor patterns, not only the CPG but also higher centers are involved to adjust the motor pattern according to sensory signals. We have proposed a simple hierarchical learning control model composed of the CPG and higher centers and shown that the control model realizes robust control against perturbations.